私はこの比較を作るとき、最初にルールを決めました。
「一番映える1本」で判断しないこと。
理由はシンプルです。実運用で必要なのは、偶然の当たりではなく、締切の中で再現できる品質だからです。
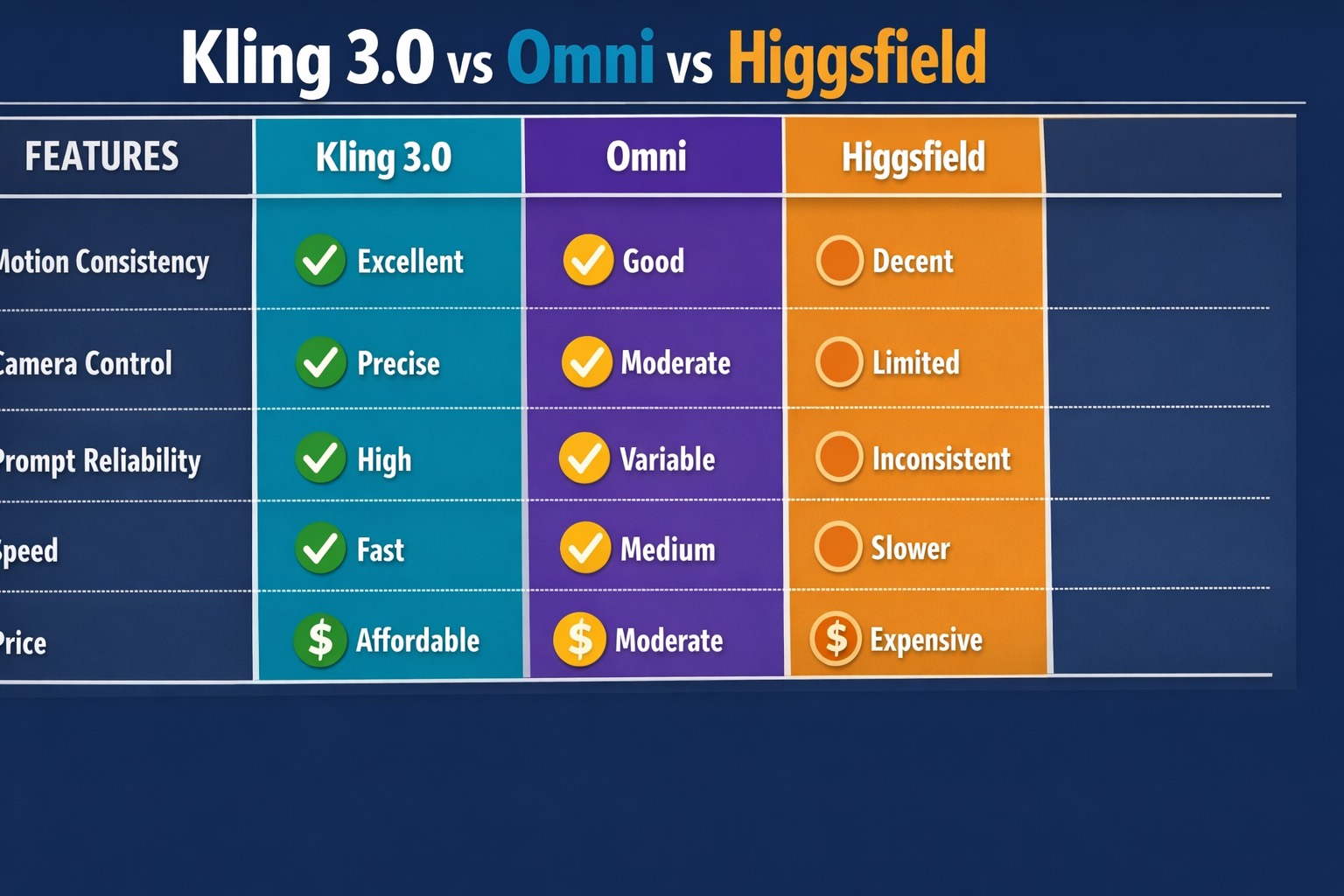
このページでは、Kling 3.0 / Omni / Higgsfield を Motion Control 観点で並べ、どの条件ならどれを選ぶべきかを実務的に整理します。
先に結論
- 安定したモーション転送と運鏡制御を重視するなら Kling 3.0 が最も実務向き
- クリエイティブな探索幅を優先するなら Omni に強みがある
- 低負荷のアイデア検証なら Higgsfield でも十分な場面がある
ただし、この結論は「同条件比較」でのみ意味があります。
比較条件(再現可能な設計)
私は以下を固定して検証しました。
- 参照動画品質
- プロンプト骨格
- 評価基準
- 再実行回数
評価軸は6つです。
- モーション一貫性
- カメラ意図追従
- 被写体整合性
- プロンプト再現性
- 生成スピード
- 使える1本あたりコスト
ユースケースは次の3種類。
- パフォーマンス系短尺
- 商品紹介ショット
- 広告クリエイティブ
なぜネットの比較はズレるのか
ありがちな問題は次の通りです。
- モデルごとに別の参照素材を使う
- モデルごとに別のプロンプトを書く
- ベストショットだけ見せる
- 再実行のブレを測らない
これでは選定基準として使えません。
1) モーション一貫性
Kling 3.0
低〜中高のモーション帯域で一貫性が高い。特に重心移動を含むカットで破綻率が低い。
Omni
高品質な結果は出るが、再実行時の揺らぎが比較的大きい。
Higgsfield
シンプル動作は問題ないが、複合動作で上限が早く見える。
実務で重要なのはピーク品質ではなく、平均の安定です。
2) カメラ制御精度
Kling 3.0
tracking / push-in / locked frame のような明示指示に対して反応が読みやすい。
Omni
カメラ挙動は良いが、意図外の演出が混ざるケースがある。
Higgsfield
基本操作は可能だが、細かな追従精度は弱め。
ストーリーボード厳守案件では、この差がそのまま修正工数になります。
3) 被写体保持
Kling 3.0
中速以上でも比率保持が比較的安定。
Omni
良好だが、強い動きで不安定化する場面がある。
Higgsfield
高速領域で顔・手の乱れが出やすい。
被写体崩れは一発で再生成案件になるため、コスト影響が大きいです。
4) プロンプト再現性
Kling 3.0
構造化プロンプトとの相性が良く、再現性が高い。
Omni
創造性は高いが run-to-run の分散も大きい。
Higgsfield
単純条件は通るが複雑制約で不安定になりやすい。
チーム運用では「再現できるか」が最重要です。
5) スピードとスループット
- Kling 3.0: 反復運用に向く速度感
- Omni: 中程度
- Higgsfield: 条件次第で遅延が目立つ
スピード単体ではなく、可用率との掛け算で見るべきです。
6) コスト効率
月額比較だけでは不十分です。
私は次の式で計算します。
月コスト /(総生成数 × 可用率)= 使える1本あたりコスト
この観点では、モーション重視案件で Kling 3.0 が有利になるケースが多かったです。
用途別の選び方
Kling 3.0 を選ぶべきケース
- 納品品質を安定化したい
- 運鏡意図を厳密に通したい
- テンプレート化して量産したい
- チーム運用で再現性が必要
Omni を選ぶべきケース
- 表現探索を最優先したい
- ブレを許容できる
- 方向性を探っている段階
Higgsfield を選ぶべきケース
- 低コストで概念検証したい
- 動作が単純な案件が多い
- 厳密な再現性を求めない
3日で終わる実践ベンチマーク
Day 1
- 固定プロンプト骨格を作る
- 参照動画を2本固定
- 3モデル×3強度で実行
Day 2
- 同一ルーブリックで採点
- 上位結果を再実行
- pass/fail を記録
Day 3
- 可用コストを算出
- 納期適合性を比較
- 導入モデルを決定
この手順だけで、感覚的な選定をほぼ排除できます。
比較時に使うプロンプト骨格
- 被写体属性
- シーン文脈
- カメラ意図
- 動きの定義
- 品質制約
- 負例制約
例:
雨のネオン街を走る女性アスリート、黒のトレーニングウェア、前左からの滑らかな追従ショット、前進モメンタムを維持、時間的一貫性を重視、ジッター回避、四肢歪み回避、急激ズーム回避。
関連ページ
- Kling 3.0 Pricing: Free vs Pro vs API
- How to Use Kling 3.0 Motion Control
- Kling 3.0 Documentation API Motion Score Guide
- Kling 3.0 Motion Control Tool
The Bottom Line
私の実務ランキングは次の通りです。
- Kling 3.0(安定性と制御性のバランスが最も良い)
- Omni(表現力は強いが変動が大きい)
- Higgsfield(探索向き、厳密運用は工夫が必要)
最終的に選ぶべきは「一番派手なモデル」ではありません。
「締切と品質基準の中で、最も再現できるモデル」です。