저는 대부분의 제작자가 실제로 작업하는 방식인 Kling 3.0, Omni 및 Higgsfield를 테스트했습니다. 즉, 동일한 참조 품질, 유사한 프롬프트 의도, 반복 실행 및 엄격한 통과/실패 기준이 있습니다.
과대광고도 없고, 팬보이도 받아들이지 않으며, "클립 하나가 멋있어 보여서 승리"도 없습니다.
움직임이 많은 AI 비디오를 위해 이러한 도구 중 하나를 선택하려는 경우 이 가이드를 사용하면 시간, 크레딧 및 재작업을 절약할 수 있습니다.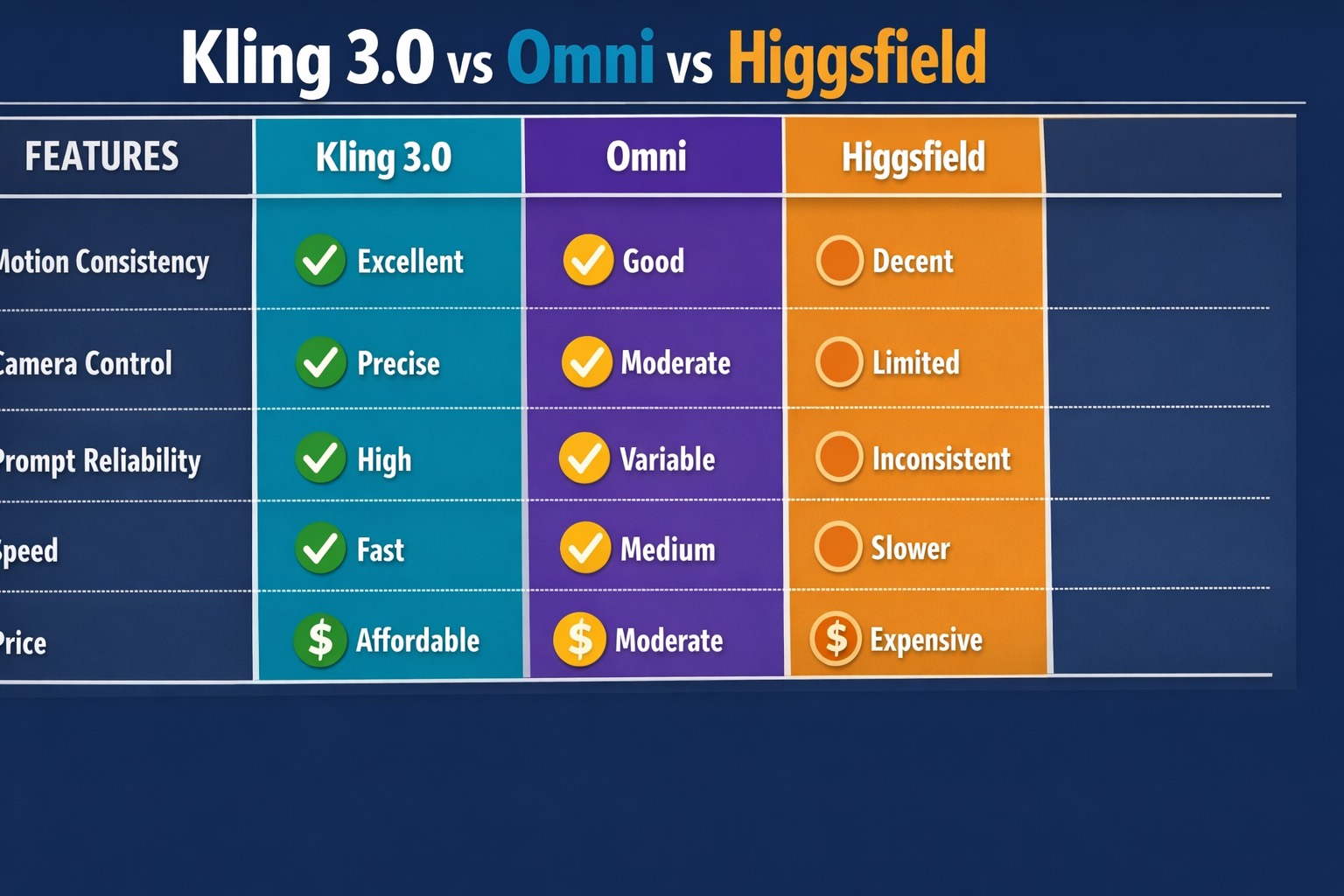
당신이 물어봐야 할 진짜 질문
대부분의 비교에서는 “어떤 모델이 가장 좋은가?”라고 묻습니다.
그것은 잘못된 질문입니다.
올바른 질문은 다음과 같습니다.
귀하의 작업 흐름에 가장 높은 가용 출력 속도를 제공하는 모델은 무엇입니까?
도구는 인상적인 데모를 생성할 수 있지만 일관성이 좋지 않으면 계속해서 생산에 실패할 수 있습니다.
내 테스트 프레임워크(재현 가능)
동일한 기준표를 사용하여 세 가지 모델을 모두 평가했습니다.
- 전체 클립에 대한 모션 일관성
- 카메라 의도 준수
- 이동 중인 대상의 무결성
- 재실행 시 신속한 신뢰성 제공
- 반복 속도
- 사용 가능한 클립당 비용
그리고 저는 세 가지 실제 사용 사례를 테스트했습니다.
- 크리에이터 스타일의 단편 퍼포먼스 영상
- 카메라 움직임을 제어하여 제품 공개
- 주제 연속성을 요구하는 브랜드 소셜 광고
높은 수준의 판결
안정적인 모션 전송과 카메라 동작 제어가 우선이라면 [[P606]]]가 현재 테스트에서 작동상 가장 예측 가능한 옵션입니다.
실험과 문체 변화를 우선시하는 경우 Omni는 특정 장면에서 매력적일 수 있습니다.
우선순위가 낮은 설정 오버헤드로 빠른 탐색인 경우 Higgsfield가 작동할 수 있지만 일관성 한계는 복잡한 모션에서 더 일찍 나타납니다.
카테고리별 분석
1) 모션 일관성
이것이 핵심 요소입니다.
- Kling 3.0: 저중간 및 중상위 이동 범위에서 최고의 안정성
- Omni: 선택한 실행에서 좋은 결과, 재실행 시 더 많은 차이
- Higgsfield: 단순한 모션에 적합하며 계층화된 모션 복잡성에서는 약함
이것이 실제로 의미하는 바는 다음과 같습니다.
여러 클립에 걸쳐 반복 가능한 출력이 필요한 경우 Kling 3.0를 사용하면 "복권 효과"가 줄어듭니다.
2) 카메라 제어 정밀도
- Kling 3.0: 명시적인 카메라 언어(추적, 푸시인, 잠긴 프레임)에 대한 더 명확한 응답
- Omni: 적당한 카메라 준수, 가끔 즉흥적으로 연주함
- Higgsfield: 기본 의도에 대해 실행 가능하지만 미묘한 추적 동작에서는 정확도가 떨어집니다.
스토리보드가 카메라 분야에 따라 달라지는 경우 이 범주는 원시 스타일 품질보다 더 중요합니다.
3) 이동 중 대상 무결성
- Kling 3.0: 제어된 범위에서 신체 비율을 더 강력하게 유지합니다.
- Omni: 괜찮지만 강도가 높아지면 표류할 수 있음
- Higgsfield: 더 빠른 시퀀스에서 신체와 얼굴 불일치에 더 취약합니다.광고 및 상업용 워크플로의 경우 무결성 중단은 전체 재실행을 유발하므로 비용이 많이 듭니다.
4) 신속한 신뢰성
- Kling 3.0: 구조화된 프롬프트를 사용할 때 높은 반복성
- Omni: 창의적이지만 덜 결정적인 실행 간 실행
- Higgsfield: 간단한 프롬프트에는 허용되지만 복잡한 제약 조건에서는 약함
팀이 결정적 행동을 요구하는 경우 일반적으로 예측 가능성이 가끔씩의 탁월함보다 중요합니다.
5) 생성 속도 및 처리량
- Kling 3.0: 반복적인 생산 루프에 충분히 빠릅니다.
- Omni: 테스트에서 중간 속도
- Higgsfield: 특정 조건에서는 속도가 느려질 수 있습니다.
속도만으로는 의사결정자가 될 수 없지만 사용 가능한 속도는 더욱 복잡해집니다.
6) 가격 및 생산량의 경제성
요금제 가격을 비교하는 것만으로는 충분하지 않습니다.
다음 공식을 사용하세요.
Monthly cost / (total runs × usable rate) = cost per usable clip
내 테스트에서 Kling 3.0는 실행 낭비가 적기 때문에 모션 중심 워크로드에 대해 더 나은 출력 경제성을 제공하는 경우가 많았습니다.
각 도구가 승리하는 곳
Kling 3.0가 승리할 때
- 재실행에도 살아남는 모션 전송이 필요합니다.
- 카메라 동작은 명시적인 의도를 따라야 합니다.
- 반복 가능한 클라이언트 워크플로를 실행합니다.
- 대규모로 예측 가능한 품질을 중요하게 생각합니다.
Omni가 승리할 때
- 더 넓은 문체 탐색을 선호합니다.
- 더 높은 출력 변동을 수용합니다.
- 결정론적 제어보다 창의적인 범위를 우선시합니다.
Higgsfield가 승리할 때
- 빠른 컨셉 초안이 필요합니다
- 모션 복잡성이 제한됩니다.
- 엄격한 생산 모드가 아닌 탐색 모드에 있습니다.
흔히 저지르는 실수: 제어 변수 없이 테스트하기
많은 온라인 비교는 다음과 같은 이유로 오해의 소지가 있습니다.
- 모델별로 레퍼런스가 다름
- 모델별로 다른 프롬프트 구조
- 재실행 일관성 테스트 없음
비교가 아닌 하이라이트 영상입니다.
실제 답변을 원한다면 참고자료, 프롬프트 뼈대, 평가 기준을 일정하게 유지하세요.
공정한 비교를 위한 나의 프롬프트 구조
각 모델에 동일한 비계를 사용했습니다.
- 피험자의 정체성
- 장면 맥락
- 카메라 의도
- 모션 동작
- 품질 제약
- 부정적인 제약
예:
A female athlete in black training outfit running on a wet neon street at night, smooth tracking shot from front-left angle, controlled forward momentum, high temporal coherence, avoid jitter, avoid limb distortion, avoid sudden zoom shifts.
이렇게 하면 비교가 유용하고 재현 가능해집니다.
Kling 3.0 vs Omni vs Higgsfield에 대해 배운 것
교훈 1: 일관성이 생산 품질의 최고치를 능가합니다.
다음 5번의 실행이 실패하더라도 하나의 완벽한 출력은 중요하지 않습니다.
강의 2: 카메라 제어 품질이 승수입니다
강력한 카메라 준수로 스토리텔링, 편집 효율성 및 고객 승인 속도가 향상됩니다.
강의 3: 모션이 많은 워크플로는 모델의 약점을 빠르게 드러냅니다.
정적 미용 테스트는 동작 신뢰성을 예측하지 않습니다.
지금 사용할 수 있는 의사결정 트리
다음과 같은 경우 Kling 3.0를 선택하세요.
- 고객 대상 비디오를 정기적으로 전달합니다.
- 안정적인 모션 전송이 필요합니다
- 카메라 정밀도가 필요합니다4. 사용 가능한 클립 경제성을 최적화합니다.
다음과 같은 경우 Omni를 선택하세요.
- 당신은 여전히 스타일 방향을 모색하고 있습니다.
- 실행 변동을 허용할 수 있습니다.
- 워크플로는 실험에 대한 보상을 제공합니다.
다음과 같은 경우 Higgsfield를 선택하세요.
- 마찰이 적은 아이디어를 원합니다
- 엄격한 모션 재현성이 필요하지 않습니다.
- 개념을 빠르게 검증하고 있습니다.
이것이 가격 및 API 전략과 어떻게 연결되는지
선택한 모델은 광고 무대와 일치해야 합니다.
- 탐색 단계: 더 많은 차이를 수용하고 더 낮은 약속을 수용합니다.
- 생산 단계: 일관성과 처리량 우선순위
- 확장 단계: 자동화 및 표준화 우선순위
예산을 먼저 결정하신다면 Kling 3.0 가격: 무료 요금제, Pro 가격, API 크레딧을 읽어보세요.
프로덕션 제어를 구현하는 경우 Kling 3.0 문서 API 모션 점수 가이드를 읽어보세요.
아직 기본 워크플로를 구축 중이라면 Kling 3.0 Motion Control](/blog/how-to-use-kling-3-0-motion-control) 사용 방법부터 시작하세요.
커밋하기 전에 권장되는 테스트 프로토콜
3일간의 미니 벤치마크를 실행해 보세요.
1일차
- 하나의 고정 프롬프트 뼈대를 구축하세요
- 깨끗한 참고자료 2개를 선택하세요.
- 각 모델에서 저/중/고 모션 변형을 실행합니다.
2일차
- 동일한 루브릭으로 각 실행에 점수를 매깁니다.
- 반복성을 테스트하기 위해 최상의 변형을 다시 실행합니다.
- 사용 사례별 통과/실패 기록
3일차
- 사용 가능한 클립당 비용 계산
- 처리 시간 비교
- 설렘이 아닌 경제성으로 모델을 선택하라
이 프로세스는 간단하지만 비용이 많이 드는 도구 이탈을 방지합니다.
결론
모션 제어 우선 워크플로의 경우 실제 순위는 다음과 같습니다.
- Kling 3.0 (최고의 운영 일관성)
- Omni (강력한 창의적 범위, 더 많은 다양성)
- Higgsfield (아이디어 발상에는 좋고 엄격한 반복성에는 약함)
귀하의 "최고의 모델"은 가장 아름다운 단일 출력을 가진 모델이 아닙니다.
마감 기한이 촉박한 상황에서도 안정적이고 사용 가능하며 반복 가능한 결과를 제공하는 것입니다.
이것이 목표라면 Kling 3.0 Motion Control로 벤치마크를 시작하고 동일한 생산 기준표를 기준으로 모든 도구를 평가하세요.